 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網
氣動機械手與人工智能
BionicSoftHand
氣動機械手與人工智能
無論是抓、握還是旋轉、觸摸、敲擊或者按壓——日常生活中,我們都會用手完成這些各式各樣的動作。人手是大自然真正的杰作——一種多么奇妙的工具。沒有什么比在協作式工作空間中裝入有仿生夾具、且可以通過人工智能學習來解決各種各樣抓握和轉動任務的機器人更便捷的了。
強化學習:獎勵原則
BionicSoftHand使用強化學習法,即通過鞏固強化進行學習。這意味著機械手將會習得一個目標,而不是一個必須模仿的具體行為。這需要它通過反復嘗試(試錯)實現。在所得反饋的基礎上——無論積極還是消極的反饋——它不斷優化行動,直到終成功完成任務。
現實機械手的數字雙胞胎
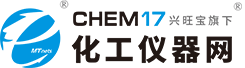
具體來說,BionicSoftHand應該轉動一個十二面骰子,終使預先的一面向上。借助在虛擬環境中借助深度相機數據與人工智能算法創建的數字雙胞胎,可以完成對必要行為策略的學習。
通過大規模并行學習快速傳授知識
數字模擬模型,尤其是在將模型數量增倍時,可大大加快訓練速度。在大規模并行學習中,所習得的知識將共享給所有虛擬機械手,然后在新的知識水平基礎上繼續工作——一個錯誤只犯一次。而成功的行動會立即被所有模型采納。
模擬操控訓練結束后,所習得的操控方法將被轉移到現實的BionicSoftHand中。通過虛擬環境中習得的行為策略,機械手可將骰子轉動至所需的一面,將來還可實現對其他物體的定向操作。通過這種方式將?已習得的知識模塊和新技能分享給其他機械手,實現全面信息覆蓋。
氣動運動學與3D織物
與人類的手不同,BionicSoftHand沒有骨骼。它通過手指上的氣動波紋管結構控制動作。當氣室充滿空氣時,手指彎曲;氣室排空時,手指呈伸展狀態。拇指和食指中還裝有旋轉模型,使這兩個手指可橫向移動。通過這一設計,仿生機械手總共可實現12個自由度。
手指上的波紋管被一個特殊的3D紡織涂層包圍,該涂層由有彈性且高強度的線編織而成。紡織涂層用于確定該構造擴展的位置與發力點、以及擴展受阻的位置。
壓電式比例閥實現調控
為了大限度減低BionicSoftHand軟管設計的復雜度,開發人員在手的正下方設計了一個小型數字化調控的閥島。如此可不必通過牽拉整個機械臂完成對手指的操控。因此,BionicSoftHand的進氣和排氣各通過一根軟管進行,可以快速、輕松連接并投入運行。使用的壓電式比例閥可控制手指運動。
人機協作潛力
BionicSoftHand中靈活的氣動運動學設計以及對彈性材料和輕型部件的運用使其不同于電動或電纜驅動的機械手,也使其生產成本降低。由于采用模塊化設計,也可以更換使用三指或四指的夾具。
與氣動輕型機器人(如 BionicCobot 或 BionicSoftArm)相結合,可實現直接且安全的人機協作。兩臺機器人均具有柔性,無需像傳統工廠機器人那樣與工人隔離。
因此,BionicSoftHand專為應用于未來工廠的協作式工作空間而設計。由于靈活的機械手可有力且靈敏地抓握,因此可以作為各類組裝工作的“第三只”輔助手臂或用作服務機器人。